Publications
|
|
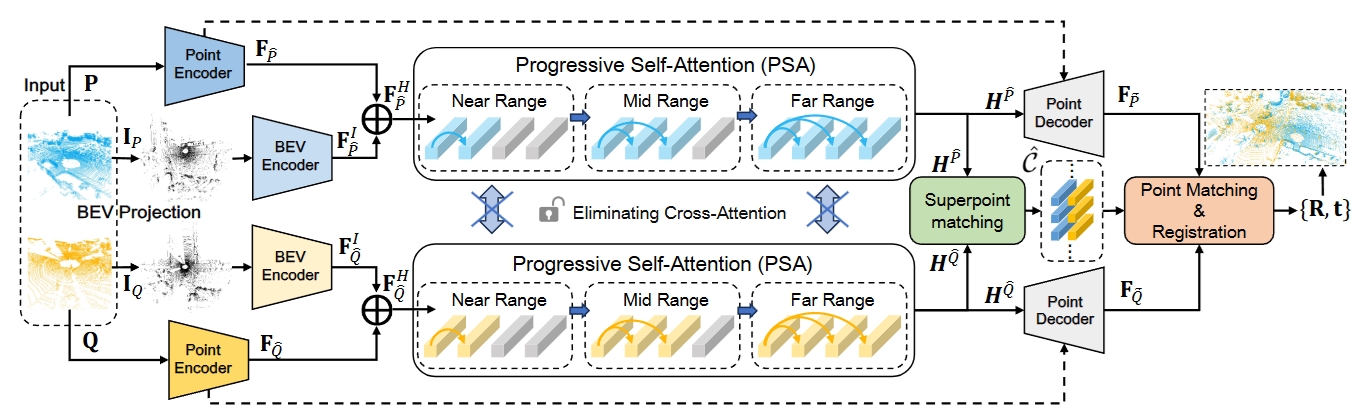
Unlocking Generalization Power in LiDAR Point Cloud Registration,
CVPR 2025 Highlight |
|
|
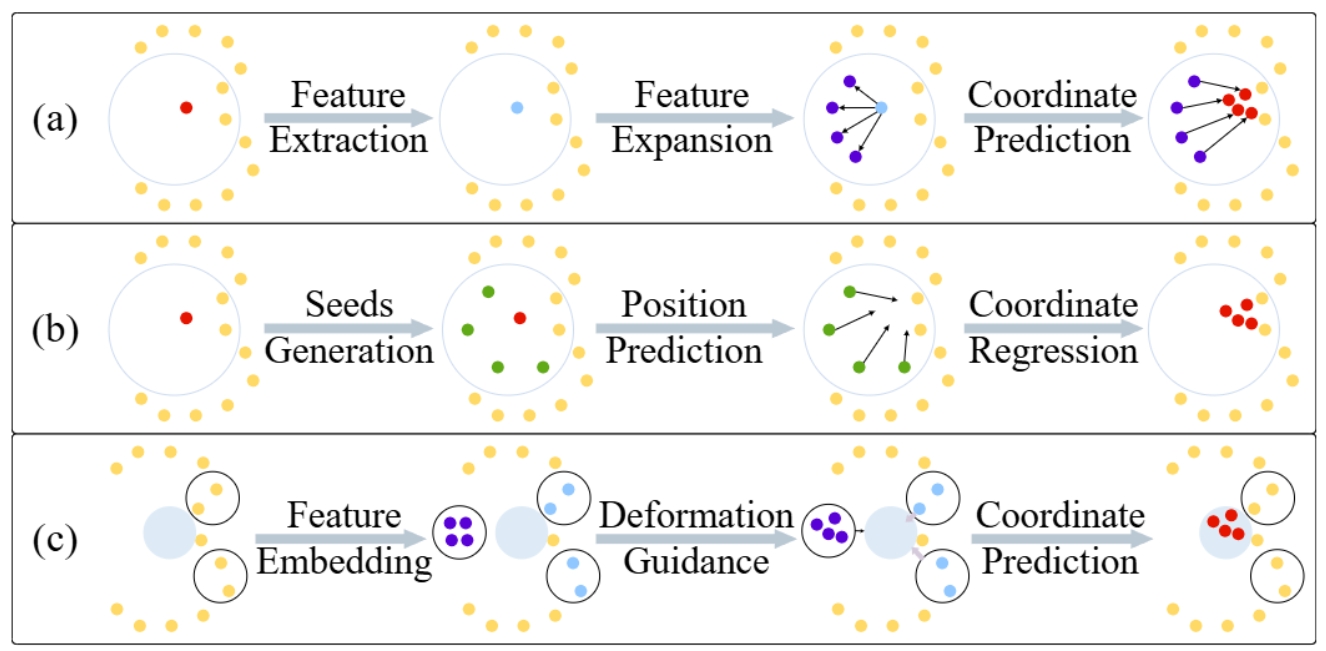
SPU-IMR: Self-supervised Arbitrary-scale Point Cloud Upsampling via Iterative
Mask-recovery Network, AAAI 2025 |
|
|
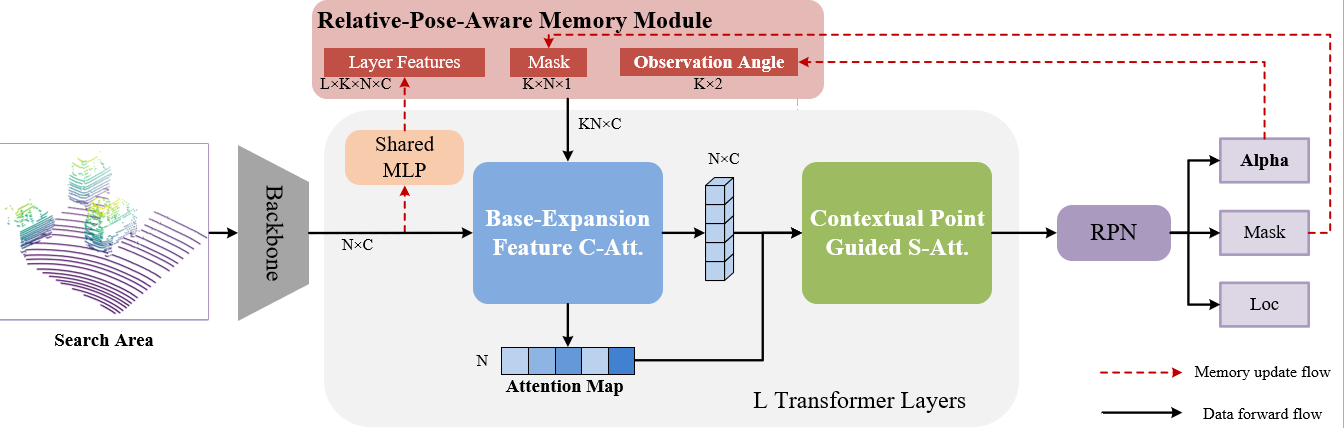
3D Single-object Tracking in Point Clouds
with High Temporal Variation, ECCV 2024 We explore a new task in 3D SOT, and presented the first 3D SOT framework for high temporal variation scenarios, HVTrack. Its three main components, RPM, BEA, and CPA, allow HVTrack to achieve robustness to point cloud variations, similar object distractions, and background noise. HVTrack significantly outperforms existing trackers in high temporal variation scenarios (11.3% and 15.7% improvement in success and precision at medium intensity of variation). The performance gap between our HVTrack and existing trackers widens as variations are exacerbated. It also surpasses existing methods in both nuScenes and Waymo benchmarks of regular tracking, achieving SOTA. paper / bibtex / code |
|
|
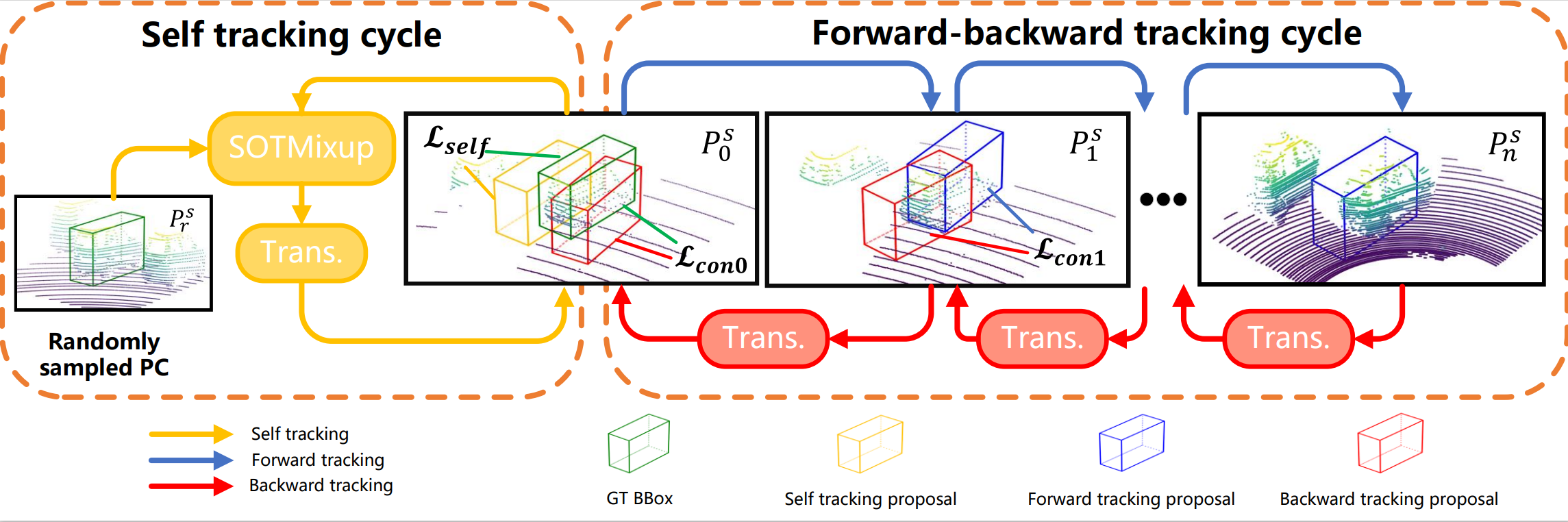
MixCycle: Mixup Assisted Semi-Supervised 3D Single Object
Tracking with Cycle Consistency, ICCV 2023 We propose the first semi-supervised approach to 3D Single Object Tracking. Our method, MixCycle, uses self and forward-backward cycle-consistency for supervision, and introduce a data augmentation strategy named SOTMixup to improve the tracker's robustness to point cloud diversity. It is generalizes to appearance matching-based trackers. paper / bibtex / code |
|
|
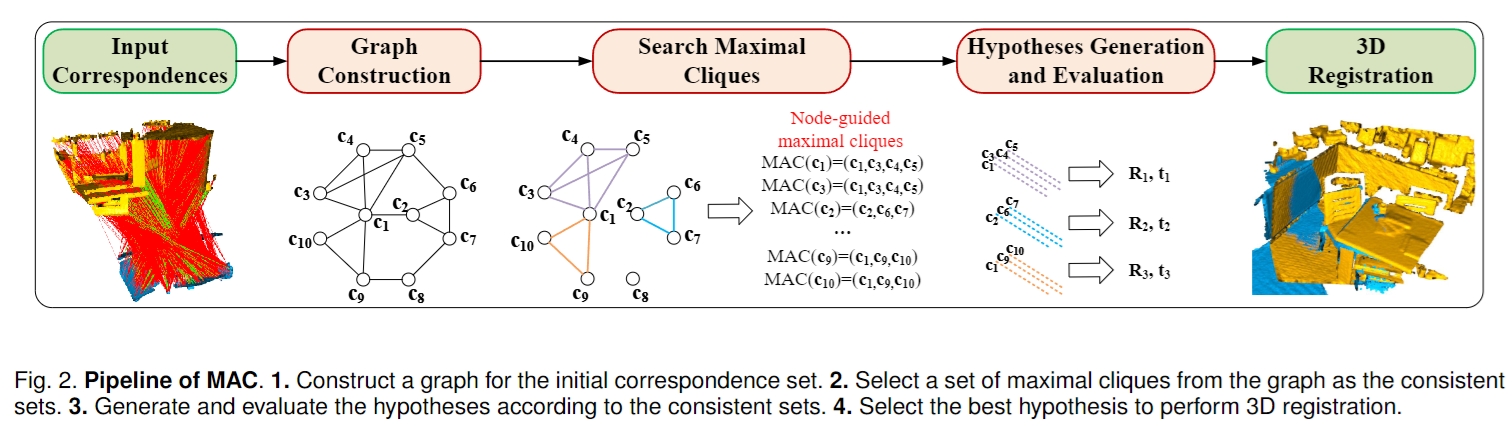
MAC: Maximal Cliques for 3D Registration, TPAMI 2024 This paper presents a 3D registration method with maximal cliques (MAC) for 3D point cloud registration (PCR). The key insight is to loosen the previous maximum clique constraint and mine more local consensus information in a graph for accurate pose hypotheses generation. In addition, we present a variant of MAC if given overlap prior, called MAC-OP. Extensive experiments demonstrate that both MAC and MAC-OP effectively increase registration recall, outperform various state-of-the-art methods, and boost the performance of deep-learned methods. paper / bibtex / code |